 < Control De Velocidad Mecánico
< Control De Velocidad Mecánico
Los reductores de velocidad planetarios son muy populares debido a la forma en que transmiten una gran cantidad de poder a través de un paquete relativamente pequeño. El “engranaje” central está rodeada por una serie de “engranajes planetarios” que involucran tanto al engranaje y engranaje de anillo exterior. Debido a la gran cantidad de dientes de engranaje siempre en contacto, se transmite una gran cantidad de torque.
La unidad de tracción anillo-cónico es muy similar. El engranaje central se sustituye por un disco de entrada, los engranajes planetarios por los conos, y el engranaje de anillo por un anillo de control. No hay dientes de los engranajes. El torque se transmite a través del contacto con los bordes de rodadura de los conos.
Si este fuera el sistema completo, y el retén Cono estuviera atado al eje de salida, operaría como un reductor de velocidad simple. De hecho, SHIMPO fabrica estos reductores de velocidad, para aplicaciones que no pueden tolerar la fluctuación de la velocidad que resulta de acoplar y desacoplar los dientes de engranaje. Sin engranajes, sin ondulación.
Sin embargo, el sistema de velocidad variable anillo-cónico separa los conos del eje de salida, y añade otro elemento de contacto, el disco de levas, para permitir los cambios de velocidad de salida.
Como se muestra en el diagrama de la derecha, es una forma cónica, con una superficie tallo. Cuando se coloca en un retenedor, los conos se mantienen en un ángulo tal que una parte de la superficie del cono es horizontal. Esta superficie horizontal hace contacto con el anillo de control.
El disco de entrada está ligado al eje de entrada, normalmente girando a la velocidad del motor, y los contactos de los conos bajo la superficie cónica en un hombro mecanizado. La cámara de presión está ligada al eje de salida, y hace contacto con los Conos en la parte inferior de su borde exterior. El Anillo de Control está ligado al cuerpo de la unidad, por lo que no gira. Hace contacto con los conos a lo largo de la superficie horizontal, y puede deslizarse desde el borde exterior hasta cerca de el centro de los conos.
El anillo de control es el elemento de velocidad variable en el sistema de anillo-cónico. Cuando se mueve hacia el centro de los conos, los hace girar más rápido, a medida que orbitan alrededor del disco de entrada. Movido hacia el borde exterior, el anillo de control hace que los conos giren más lentamente. Como los bordes externos de los conos cambian de velocidad, el disco de leva (y, por tanto, el eje de salida) también cambia la velocidad.
 Al girar los conos, están en órbita alrededor del disco de entrada, al igual que con un sistema típico de engranajes planetarios. Si el anillo de control es ajustado, la velocidad de la órbita y la velocidad del cono del borde se anulan entre sí, el eje de salida permanecerá estacionaria bajo el poder. Esta es una característica única del sistema anillo-cónico.
Al girar los conos, están en órbita alrededor del disco de entrada, al igual que con un sistema típico de engranajes planetarios. Si el anillo de control es ajustado, la velocidad de la órbita y la velocidad del cono del borde se anulan entre sí, el eje de salida permanecerá estacionaria bajo el poder. Esta es una característica única del sistema anillo-cónico.
El sistema de anillo-cónico es esencialmente un reductor de velocidad variable. Es decir, la velocidad de salida es el resultado de una relación de reducción cambiante, lo que significa que aumenta el torque a medida que la velocidad de salida disminuye. Esto es lo que hace que el sistema anillo-cónico sea superior a la unidad de frecuencia variable común AC, un sistema de torque constante.
Para aprovechar aún más la relación baja velocidad / alto torque, el diseño anillo-cónico agrega un sistema de levas con resorte, lo que mantiene a los componentes de fricción más estrechamente juntos a medida que aumenta la carga.
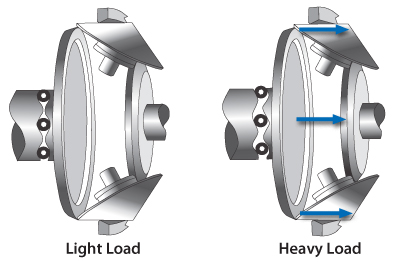 El resultado es un sistema que detendrá el motor de entrada de tamaño adecuado antes de que se deslice. Cuando la carga disminuye, el resorte de presión de los componentes se relaja, reduciendo la tensión del sistema y permitiendo a la velocidad de salida volver a la normalidad. Una vez más, una característica única que hace que al sistema anillo-cónico el ideal para las aplicaciones más exigentes, sobre todo los que están sujetos a las fluctuaciones salvajes en carga.
El resultado es un sistema que detendrá el motor de entrada de tamaño adecuado antes de que se deslice. Cuando la carga disminuye, el resorte de presión de los componentes se relaja, reduciendo la tensión del sistema y permitiendo a la velocidad de salida volver a la normalidad. Una vez más, una característica única que hace que al sistema anillo-cónico el ideal para las aplicaciones más exigentes, sobre todo los que están sujetos a las fluctuaciones salvajes en carga.
< Control De Velocidad Mecánico